

D3PM-2200-P25 Delta Robot
Nodweddiadol Cynnyrch
Nodweddiadol
1 、 Mae'r amser beicio safonol yn llai na 0.67s, sy'n cyfateb i'ch cais am y bwydo cyflymder uchel a dyletswydd trwm.
2 、 Mae dyluniad uwch y modur trydydd echel ar lwyfan symudol, yn galluogi'r robot i gyflawni cywirdeb cylchdro uchel yn hawdd.
3 、 Mae'r robot yn ddelfrydol ar gyfer gweithrediadau dyletswydd trwm, yn ogystal â chyflymder uchel a manwl uchel Defnyddir yn helaeth wrth gydosod, trin a didoli porthiant pwysau.
Paramedrau Cynnyrch
| Math | D3PM-2200-P25 | |
| Echelau | 3+1 | |
| Llwyth tâl | 25kg | |
| Manipulator | Pwysau | 153kg |
| Diamedr | 2200mm | |
| Ailadroddadwyedd | Swydd | 0.05mm |
| Cylchdro | 0.05° | |
| Cyflymder Uchaf | 180pp/munud | |
| Ystod Cylchdro | ±360 | |
| Yr Moment Uchaf o Inertia a Ganiateir | 0.224kg .m2 | |
| Amrediad Ongl Braich Actuated | I fyny | 33.2º |
| I lawr | 78.5º | |
| Cyflenwad Pŵer | Tri cham 380VAC -10% ~ + 10%, 49 ~ 61HZ | |
| Gallu Pwer | 15KVA | |
| Pŵer â Gradd | 9.2kw | |
| Tymheredd Storio | -10 ℃ ~ 70 ℃ | |
| Amgylchedd Gwaith | -10 ℃ ~ 50 ℃, RH ≤80% | |
| Amddiffyniad | IP55 | |
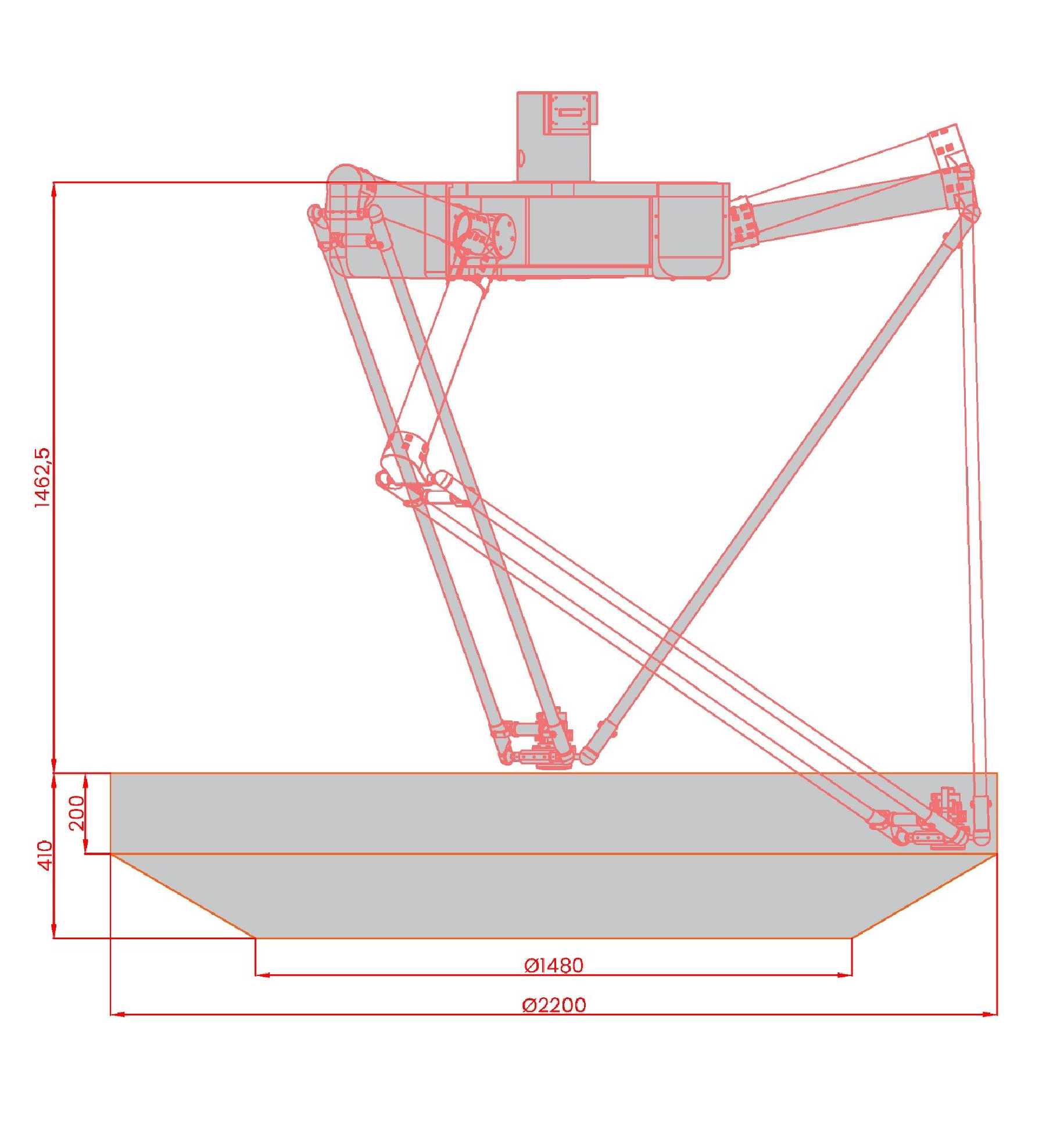
Lluniadu Cynnyrch
01. Dimensiynau ac Ystod Gweithio (mm)
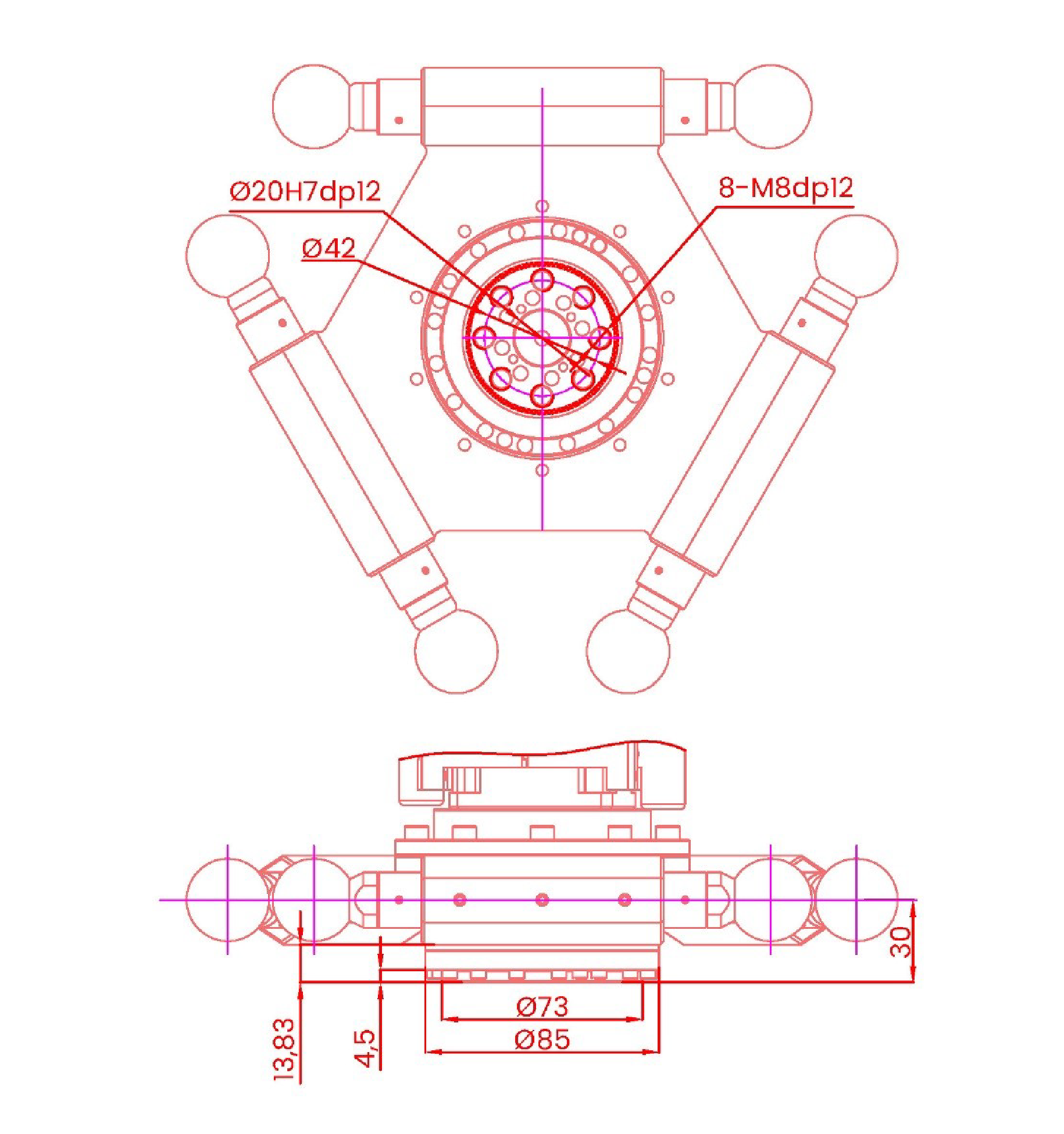
02. fflans(mm)
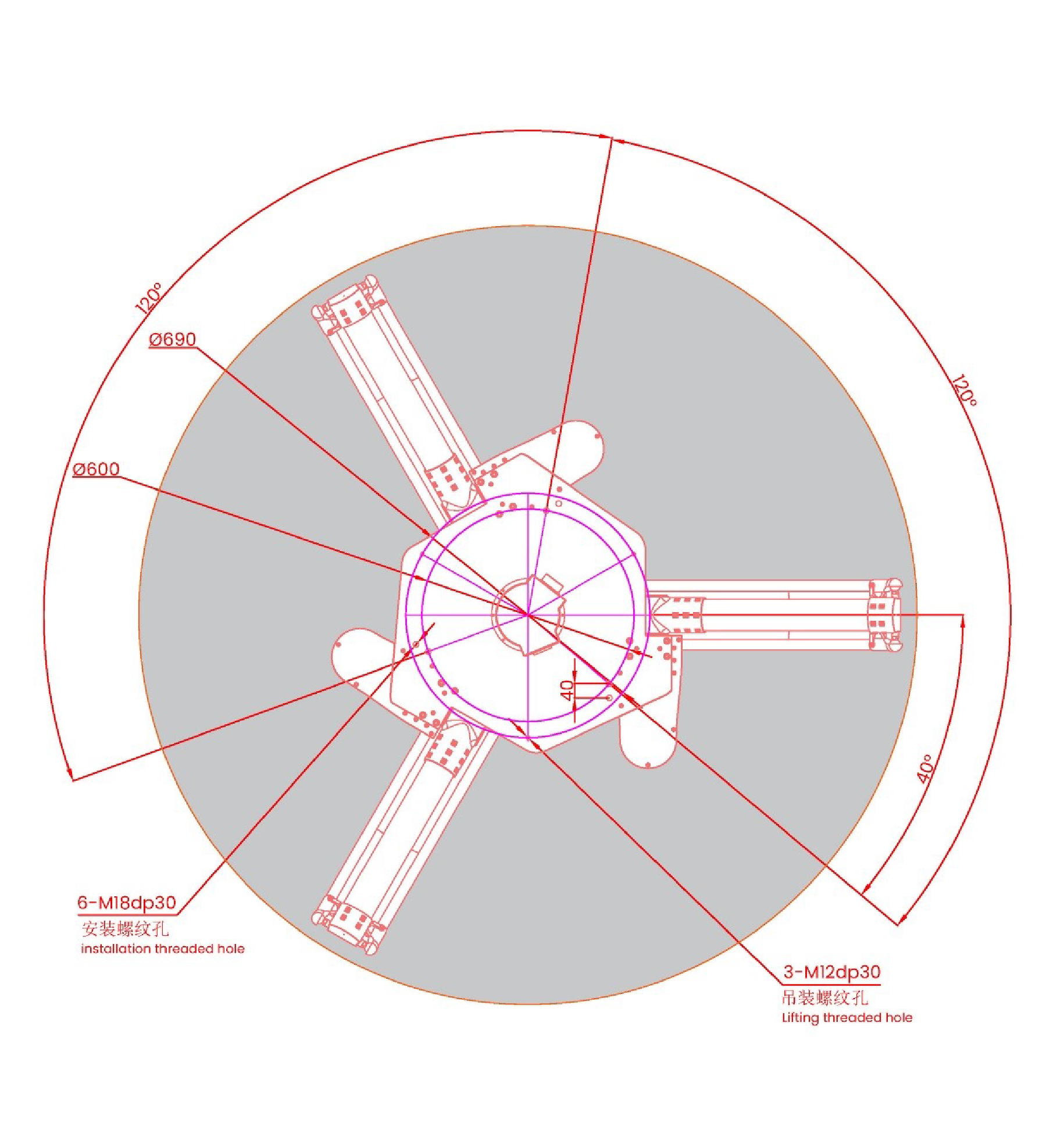
Gosodiad 03.Base(mm)
Ysgrifennwch eich neges yma a'i hanfon atom





